21 KiB
FPMCU Development for Partners
This document is intended to help partners (sensor vendors, MCU vendors, etc) that are currently (or interested in) developing fingerprint solutions for Chromebooks. The document assumes that you're using Linux to do the development; preferably a recent version of Ubuntu or Debian. Some partners have had success developing in a VM, but please note that we don't test that configuration.
[TOC]
Hardware Required for Standalone Development (no Chromebook)
The following hardware components can be used to set up a standalone development environment for FPMCU development (i.e., it does not rely on a Chromebook). Development for other ECs is often done in a similar manner, but some of them have their own standalone development or evaluation kits that don't require the use of servo.
You will need an FPMCU reference board and a servo debugger.
FPMCU board
The Fingerprint MCU (FPMCU) board has the MCU that handles all fingerprint-related functionality (matching, encryption, etc). The fingerprint sensor itself connects to the FPMCU board.
| This FPMCU board is the DragonClaw Rev 0.1. |
|---|
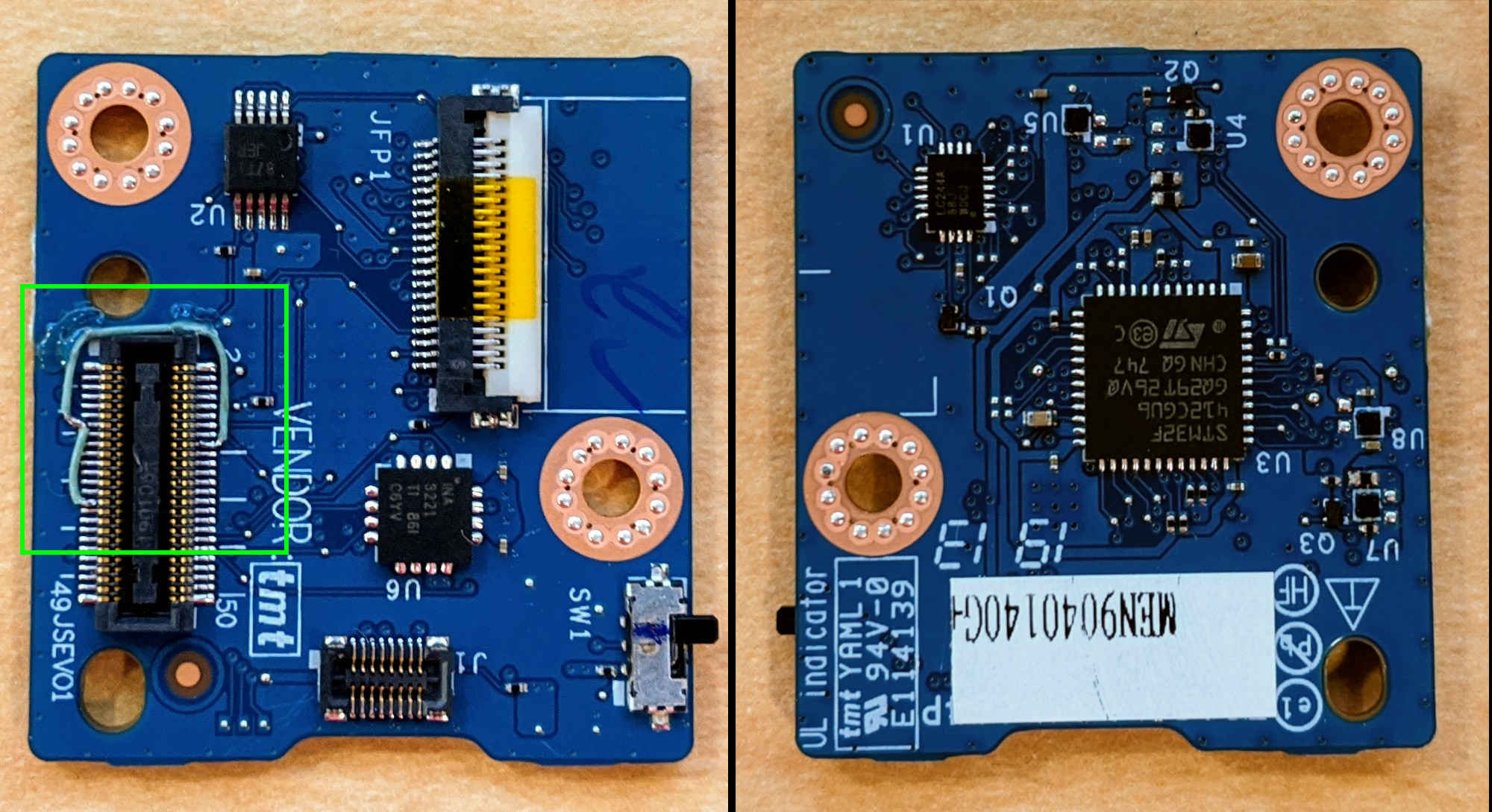 |
*** note NOTE: Some FPMCU boards need a rework in order to work properly with servo. This fix is visible in the green box above.
See the Dragonclaw Servo Fix section for more detail.
Servo
Servo is a general purpose debug board that connects to a header on the FPMCU board. Among other things, the servo supplies power to the FPMCU and can be used to program the FPMCU, interact with the EC console, take power measurements, and debug a running program. It supports SPI, UART, I2C, as well as JTAG/SWD.
There are two different servo debugger setups supported, the Servo Micro and the Servo V2 + Yoshi. The servo micro is recommended for its simplicity, but currently lack builtin JTAG/SWD support for single step debugging.
| Servo Micro | ServoV2 + Yoshi |
|---|---|
 |
ServoV2  Yoshi Flex Yoshi Flex  |
*** note For more information about both servos, see servo.
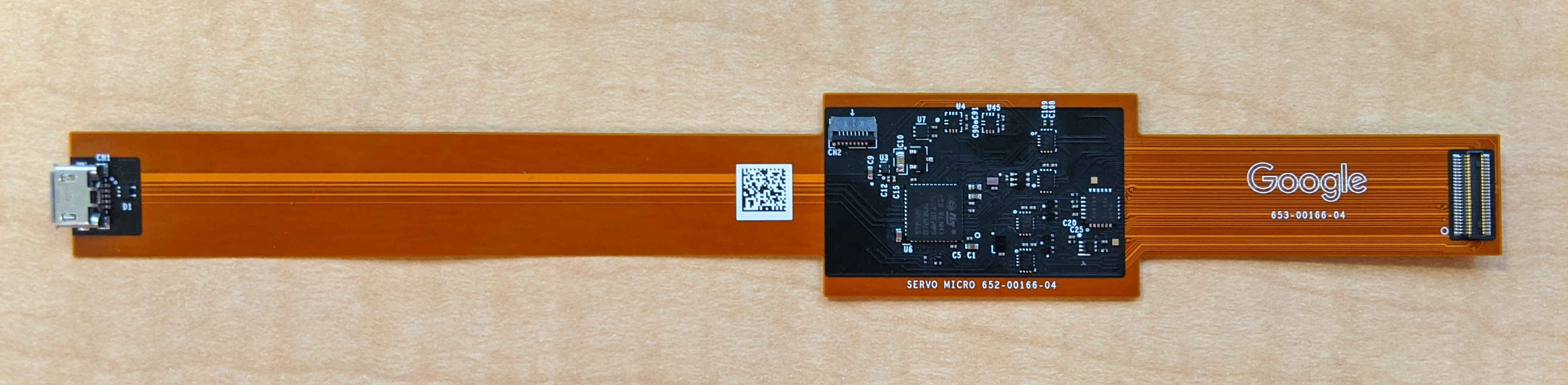
Servo Micro
Unlike the Servo V2, the newer servo micro does not require any adapters to interface with the FPMCU board.
As you can see below, one end connects to the FPMCU board and the other connect to the developer's computer over micro USB.
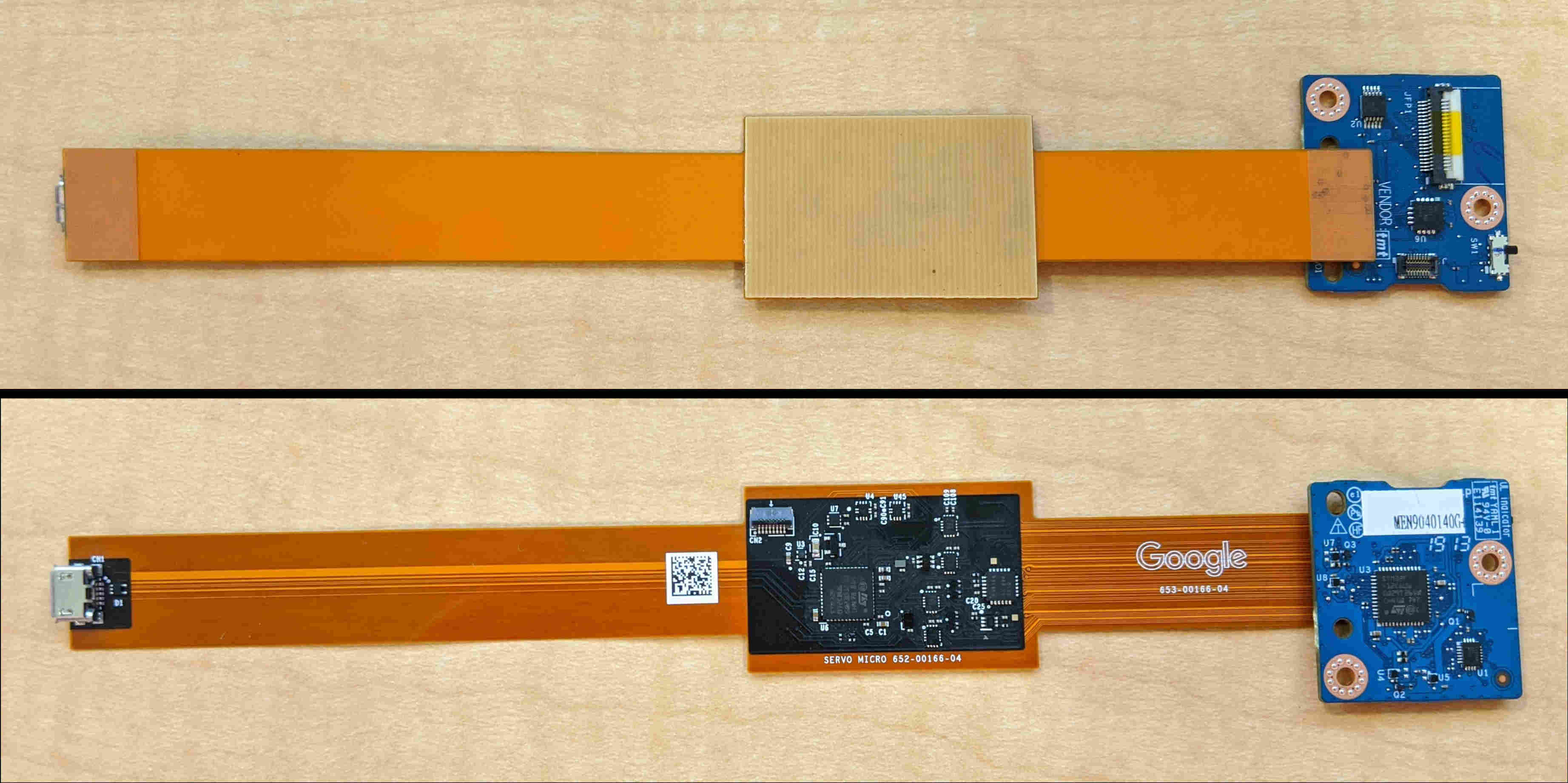
*** note For more information about Servo Micro, see Servo Micro Info.
Servo V2 + Yoshi
Servo V2 is the original full featured debugger. It requires a Yoshi Flex Cable to interface with the FPMCU.
*** note NOTE: More information on servo can be found in the servo documentation.
Yoshi Flex Cable
The Yoshi Flex cable is used to connect Servo v2 to the FPMCU board. The standard cable does not work with SWD, but a simple rework can be performed to support SWD.
| Standard Yoshi Flex | Yoshi Flex Reworked to Support SWD |
|---|---|
|
 |
Rework steps:
- Remove R18 and R19
- Wire from Pin 6 of U21 to right side of R18
- Wire from Pin 6 of U21 to right side of R19
Micro USB Cable
A micro USB cable is needed to connect the the servo v2 board to your host Linux development machine.
Servo V2 Hardware Setup
-
Connect the Yoshi Flex cable to servo, paying attention to the pin numbering.


-
Connect the other end of the Yoshi Flex cable to the servo header on the FPMCU board.


*** note Newer FPMCU boards require the ribbon cable to connect in the reverse direction.
-
Connect the fingerprint sensor to the header on the FPMCU board.
-
Connect the micro USB cable to servo's
HOST_INport. The other end of the USB cable should be plugged into your host development machine.
-
Optional: Connect SWD Debugger
If you want to use SWD for debugging, connect your debugger to the
JTAGheader on servo v2.
Software Setup
Get the Chromium OS source code
- First, make sure you have the prerequisites.
- Then get the source.
- Create and enter the
chroot.- You can stop after the
enter the chrootstep.
- You can stop after the
Build the EC(embedded controller) codebase
Open two terminals and enter the chroot in each:
# from a terminal on your machine
(outside chroot) $ cd ~/chromiumos/src
# enter the chroot (the flag is important)
(outside chroot) $ cros_sdk --no-ns-pid
*** note NOTE: More information on servo can be found in the servo documentation.
In one of the terminals, build and start servod
Build and install servod in the chroot:
(chroot) $ sudo emerge hdctools
Run servod:
(chroot) $ sudo servod --board=bloonchipper --config bloonchipper_rev0.1.xml
You should see something like this. Leave it running:
2019-04-11 15:21:53,715 - servod - INFO - Start
2019-04-11 15:21:53,765 - servod - INFO - Found servo, vid: 0x18d1 pid: 0x5002 sid: 911416-00789
2019-04-11 15:21:53,766 - servod - INFO - Found XML overlay for board zerblebarn
2019-04-11 15:21:53,766 - SystemConfig - INFO - Loading XML config (/usr/lib64/python2.7/site-packages/servo/data/servo_v2_r1.xml, None, 0)
2019-04-11 15:21:53,767 - SystemConfig - INFO - Loading XML config (/usr/lib64/python2.7/site-packages/servo/data/servo_v2_r0.xml, None, 0)
2019-04-11 15:21:53,771 - SystemConfig - INFO - Loading XML config (/usr/lib64/python2.7/site-packages/servo/data/common.xml, None, 0)
2019-04-11 15:21:53,772 - SystemConfig - INFO - Loading XML config (/usr/lib64/python2.7/site-packages/servo/data/power_tools.xml, None, 0)
2019-04-11 15:21:53,774 - SystemConfig - INFO - Loading XML config (/usr/lib64/python2.7/site-packages/servo/data/keyboard.xml, None, 0)
2019-04-11 15:21:53,775 - SystemConfig - INFO - Loading XML config (/usr/lib64/python2.7/site-packages/servo/data/uart_common.xml, None, 0)
2019-04-11 15:21:53,777 - SystemConfig - INFO - Loading XML config (/usr/lib64/python2.7/site-packages/servo/data/ftdii2c_cmd.xml, None, 0)
2019-04-11 15:21:53,777 - SystemConfig - INFO - Loading XML config (/usr/lib64/python2.7/site-packages/servo/data/usb_image_management.xml, None, 0)
2019-04-11 15:21:53,784 - SystemConfig - INFO - Loading XML config (/usr/lib64/python2.7/site-packages/servo/data/servo_zerblebarn_overlay.xml, None, 0)
2019-04-11 15:21:53,785 - SystemConfig - INFO - Loading XML config (/usr/lib64/python2.7/site-packages/servo/data/servoflex_v2_r0_p50.xml, None, 0)
2019-04-11 15:21:53,792 - Servod - INFO - Initializing interface 1 to ftdi_dummy
2019-04-11 15:21:53,792 - Servod - INFO - Initializing interface 2 to ftdi_i2c
2019-04-11 15:21:53,795 - Servod - INFO - Initializing interface 3 to ftdi_uart
2019-04-11 15:21:53,799 - Servod - INFO - /dev/pts/8
2019-04-11 15:21:53,799 - Servod - INFO - Initializing interface 4 to ftdi_uart
2019-04-11 15:21:53,802 - Servod - INFO - /dev/pts/9
2019-04-11 15:21:53,802 - Servod - INFO - Use the next FTDI part @ pid = 0x5003
2019-04-11 15:21:53,802 - Servod - INFO - Initializing interface 5 to ftdi_dummy
2019-04-11 15:21:53,802 - Servod - INFO - Use the next FTDI part @ pid = 0x5003
2019-04-11 15:21:53,802 - Servod - INFO - Initializing interface 6 to ftdi_dummy
2019-04-11 15:21:53,802 - Servod - INFO - Use the next FTDI part @ pid = 0x5003
2019-04-11 15:21:53,802 - Servod - INFO - Initializing interface 7 to ftdi_uart
2019-04-11 15:21:53,805 - Servod - INFO - /dev/pts/10
2019-04-11 15:21:53,805 - Servod - INFO - Use the next FTDI part @ pid = 0x5003
2019-04-11 15:21:53,805 - Servod - INFO - Initializing interface 8 to ftdi_uart
2019-04-11 15:21:53,808 - Servod - INFO - /dev/pts/11
2019-04-11 15:21:53,808 - Servod - INFO - Initializing interface 9 to ec3po_uart
2019-04-11 15:21:53,811 - PD/Cr50 - EC3PO Interface - INFO - -------------------- PD/Cr50 console on: /dev/pts/12
2019-04-11 15:21:53,811 - Servod - INFO - Initializing interface 10 to ec3po_uart
2019-04-11 15:21:53,812 - EC - EC3PO Interface - INFO - -------------------- EC console on: /dev/pts/14
2019-04-11 15:21:54,316 - Servod - INFO - Initialized i2c_mux to rem
2019-04-11 15:21:54,317 - Servod - INFO - Initialized i2c_mux_en to on
2019-04-11 15:21:54,319 - Servod - INFO - Initialized pch_disable to off
2019-04-11 15:21:54,320 - Servod - INFO - Initialized jtag_buf_on_flex_en to off
2019-04-11 15:21:54,321 - Servod - INFO - Initialized cold_reset to off
2019-04-11 15:21:54,322 - Servod - INFO - Initialized warm_reset to off
2019-04-11 15:21:54,323 - Servod - INFO - Initialized spi1_buf_on_flex_en to off
2019-04-11 15:21:54,324 - Servod - INFO - Initialized spi_hold to off
2019-04-11 15:21:54,326 - Servod - INFO - Initialized pwr_button to release
2019-04-11 15:21:54,327 - Servod - INFO - Initialized lid_open to yes
2019-04-11 15:21:54,328 - Servod - INFO - Initialized spi2_buf_on_flex_en to off
2019-04-11 15:21:54,330 - Servod - INFO - Initialized rec_mode to off
2019-04-11 15:21:54,331 - Servod - INFO - Initialized fw_up to off
2019-04-11 15:21:54,332 - Servod - INFO - Initialized usb_mux_sel1 to dut_sees_usbkey
2019-04-11 15:21:54,333 - Servod - INFO - Initialized prtctl4_pwren to on
2019-04-11 15:21:54,334 - Servod - INFO - Initialized uart3_en to on
2019-04-11 15:21:54,334 - Servod - INFO - Initialized dut_hub_pwren to on
2019-04-11 15:21:54,335 - Servod - INFO - Initialized kbd_en to off
2019-04-11 15:21:54,337 - Servod - INFO - Initialized spi1_vref to pp3300
2019-04-11 15:21:54,338 - Servod - INFO - Initialized spi2_vref to pp1800
2019-04-11 15:21:54,339 - Servod - INFO - Initialized uart2_en to on
2019-04-11 15:21:54,340 - Servod - INFO - Initialized uart1_en to on
2019-04-11 15:21:54,341 - Servod - INFO - Initialized jtag_buf_en to off
2019-04-11 15:21:54,342 - Servod - INFO - Initialized fw_wp_en to off
2019-04-11 15:21:54,343 - Servod - INFO - Initialized sd_vref_sel to off
2019-04-11 15:21:54,343 - Servod - INFO - Initialized ec_ec3po_interp_connect to on
2019-04-11 15:21:54,344 - Servod - INFO - Initialized uart3_vref to off
2019-04-11 15:21:54,345 - Servod - INFO - Initialized jtag_vref_sel0 to pp3300
2019-04-11 15:21:54,346 - Servod - INFO - Initialized jtag_vref_sel1 to pp3300
2019-04-11 15:21:54,346 - Servod - INFO - Initialized fpmcu_ec3po_interp_connect to on
2019-04-11 15:21:54,349 - ServoDeviceWatchdog - INFO - Watchdog setup for devices: set([(6353, 20482, '911416-00789')])
2019-04-11 15:21:54,351 - servod - INFO - Listening on localhost port 9999
In the other terminal, build and flash the firmware:
Navigate to the EC source:
(chroot) $ cd ../platform/ec
Build the firmware:
(chroot) $ make BOARD=bloonchipper -j
The resulting file will be in build/bloonchipper/ec.bin
Flash the firmware file:
(chroot) $ ./util/flash_ec --board=bloonchipper --image=./build/bloonchipper/ec.bin
Connect to the UART pty:
(chroot) $ sudo screen $(dut-control raw_fpmcu_uart_pty | cut -d: -f2)
Press enter key several times (may need to wait up to 20 seconds). Then you will see a prompt:
>
At this point you are connected to the MCU's serial (UART) console. You can list all of the available console commands with "help":
> help
Known commands:
chan fpcapture hcdebugsherase fpenroll history spixfer waitms
flashinfo fpmatch hostevent sysinfo
flashread gettime md sysjump
flashwp gpioget panicinfo syslock
flashwrite gpioset reboot taskinfo
HELP LIST = more info; HELP CMD = help on CMD.
Start a fingerprint enrollment:
> fpenroll
The DragonClaw reference board has an onboard INA that monitors the voltage and power draw of the MCU and FP Sensor independently.
| Signal Name | Description |
|---|---|
| pp3300_dx_mcu | 3.3V supplying the MCU |
| pp3300_dx_fp | 3.3V supplying the fingerprint sensor |
| pp1800_dx_fp | 1.8V supplying the fingerprint sensor |
You can monitor all power and voltages by using the following command:
(chroot) $ watch -n0.5 dut-control pp3300_dx_mcu_mv pp3300_dx_fp_mv \
pp1800_dx_fp_mv pp3300_dx_mcu_mw pp3300_dx_fp_mw pp1800_dx_fp_mw
*** note
The _mv suffix denotes millivolt and _mw suffix denotes milliwatt.
*** note See Power Measurement Documentation for more information.
Contributing Changes
Using Gerrit and git
If you’re not familiar with git, Gerrit (code review) and repo, here are
some docs to help you get started:
- Git and Gerrit Intro for Chromium OS: Useful to get started as quickly as
possible, but does not explain how
gitworks under the hood. - Set your editor: Use your favorite editor when writing
gitcommit messages. - Chromium OS Contributing Guide: Detailed overview of contributing changes to Chromium OS and the workflow we use.
- Git: Concepts and Workflow: Good overview of how
gitactually works. - Gerrit: Concepts and Workflow: Good overview of how Gerrit works; assumes
you understand
gitbasics. - Life of a patch: Android workflow, but similar to Chrome OS.
The Gerrit dashboard that will show your pending reviews (and ones we have for you):
Registering for a chromium.org Internal Account
If your partnership agreement requires non-public code sharing you will need to register for an account on the Internal Gerrit. Refer to the Gerrit Credentials Setup page for details. Once you register for an internal account, your contact at Google can make sure you have the necessary permissions to access the necessary repo.
Working with Chromebooks
Chromebooks have an FPMCU (e.g., DragonClaw) board attached to the motherboard.
You can use the device to run ectool commands and test the fingerprint sensor
from the UI.
Developer Mode and Write Protection
Make sure that your fingerprint-equipped Chrome OS device is in developer mode with a test image flashed and hardware write protection disabled. Using the test image will allow you to SSH into the device and disabling hardware write protection allows you to have full access to flashing the FPMCU firmware.
See Installing Chromium for details on flashing test images and enabling developer mode.
Connecting
In general, most of our development is done by connecting to the DUT (device under test) via SSH. We usually connect the DUT to ethernet (e.g., via USB-C to Ethernet converter), but WiFi should also work (assuming corporate firewall restrictions don’t block SSH port 22). To get the IP address, tap the battery/time icon in the lower right corner. Then tap on “Ethernet” followed by the gear icon in the upper right.
(chroot) $ ssh root@<IP_ADDRESS>
Password: test0000
Once you have SSH’ed into the DUT, you should be able to run ectool commands.
Example: Capture a "test_reset" image from the sensor and write it to a
PNM file (viewable with the ImageMagick display command):
(device) $ ectool --name=cros_fp fpmode capture test_reset; ectool --name=cros_fp waitevent 5 500; ectool --name=cros_fp fpframe > /tmp/test_reset.pnm
Alternatively, you can access a shell via the UI on device by pressing
CTRL+ALT+F2 (third key on top row). Log in with root and test0000.
Flashing FPMCU from DUT
Copy the firmware to the DUT:
(chroot) $ scp ./build/bloonchipper/ec.bin <DUT_IP>:/tmp/ec.bin
From the DUT, flash the firmware you copied:
(device) $ flash_fp_mcu /tmp/ec.bin
Troubleshooting
Dragonclaw Servo Fix
DragonClaw Rev 0.1 has a known issue with UART and JTAG. Most notably, this issue causes servo micro to fail to program the FPMCU over UART.
This issue can be fixed with the following rework steps:
- Connect servo header pin 13 to pin 18
- Connect servo header pin 13 to pin 29

Verify that servo and debugger are connected to USB
Check whether servo is enumerating on USB. If you are using a debugger (Lauterbach, J-Link, etc), also check to make sure it enumerates. Depending on the debugger being used, it may need to be powered with an external power supply.
(chroot) $ lsusb
Bus 002 Device 003: ID 0897:0004 Lauterbach # ← This is my Lauterbach (debugger)
Bus 001 Device 013: ID 18d1:5002 Google Inc. # ← This is servo
"No servos found" when running servod
If you get the following message, make sure that servo is connected to USB. You may also want to try restarting your machine (or VM).
(chroot) $ sudo servod --board=bloonchipper
2019-04-12 14:53:42,236 - servod - INFO - Start
2019-04-12 14:53:42,270 - servod - ERROR - No servos found
Losing characters in servo UART console
Make sure that this interface is disabled:
(chroot) $ dut-control usbpd_ec3po_interp_connect:off
"Sweetberry" board fails to build
If you're trying to run make buildall -j in the EC codebase and the build
fails when trying to build the "sweetberry" board, see this bug:
https://crbug.com/992082.
FPMCU console commands
- Once the console is working you can use
helpto see the commands. - There should be fingerprint commands that start with
fp(seefpsensor.cin the EC code).